Primitives
A geometric primitive is a basic building block of 3D geometry such as a cube, sphere or cylinder.
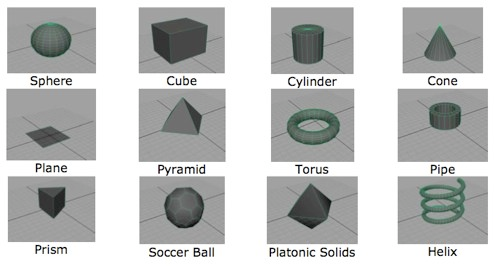

These are pre-built shapes available to 3D modellers that are used to save time and make great starting points for a variety of more complex models. The properties of primitives can often be easily changed to add subdivisions or to change the look of the shape eg. more coils in a helix.
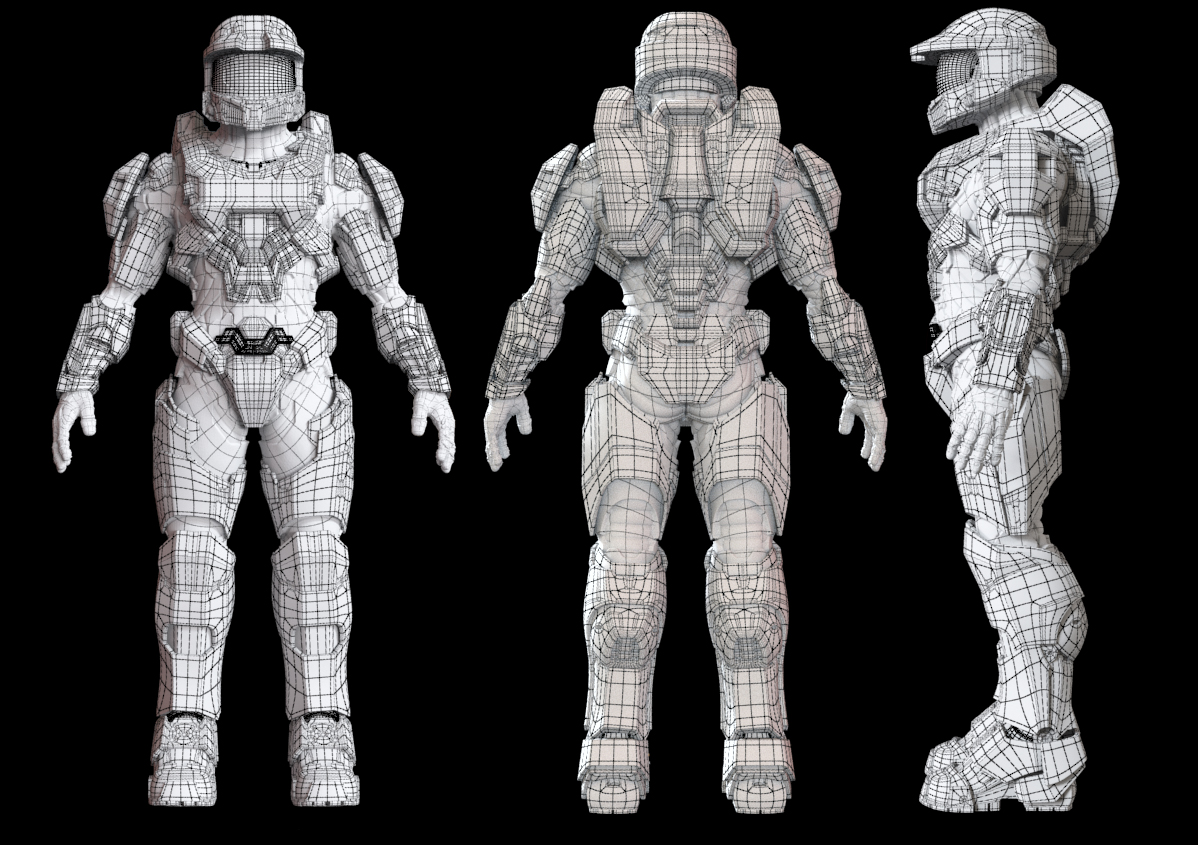
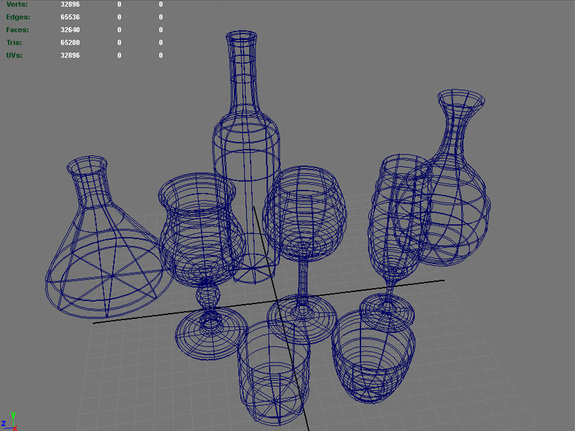
Primitives can be used effectively to create detailed looking assets such as in these examples.


Primitives are often used as the starting point for more advanced modelling techniques such as box or extrusion modelling.
Box modelling
This is a techniques for creating polygonal models in which the artist begins with a 3D primitive (often a cube - hence the name box modelling) and then refines the shape of this until the desired shape has been created.


This example demonstrates the box modelling process. You can see that the mesh began as a low resolution sphere which has been shaped and then subdivided (new edges added) at each stage to create the head you can see at the end.
Extrusion modelling
Extrusion modelling also tends to start with a primitive such as a cube but rather than adding subdivisions as is done with box modelling, new geometry is created with each extrusion.

In this example you can see the two main ways that extrusion can be used on faces. One face had been pushed in to create the door and another has been pulled out to create the chimney.
The two approaches aren’t mutually exclusive and in most cases these techniques need to be used together in order to create a complex model.
There is a range of other methods of creating 3D meshes worth investigating. These include;
- Edge/contour modelling
- NURBS modelling
- Digital sculpting
- Procedural modelling
- Image based modelling
- 3D scanning